Plato de Indexado
Esta aplicación requiere un cálculo de inercia meticuloso. La distribución y excentricidad de cada uno de los elementos en el plato son factores importantes para determinar los componentes de torque. Suelen ser aplicaciones de mediana o alta inercia y, por consiguiente, tienen altos radios de reducción.

Bobinado Central
Un eje de embobinado es ideal para ser servocontrolado. El incremento del diámetro de la bobina demanda cambios en la velocidad del sistema. Por lo tanto, una de las variables claves para dimensionar el servomotor adecuado es el perfil de movimiento de eje (velocidad máxima, aceleración y desaceleración).

Rodillo de Alimentación
Un alimentador servocontrolado permite suministrar sin contratiempos el material de manera continua. Variables como la fuerza de rozamiento y fuerza de contacto son consideradas para dimensionar correctamente el servomotor.

Banda Transportadora
Contar con bandas transportadoras o conveyors servocontrolados es importante cuando la aplicación requiere indexados definidos, posicionamientos variables o variaciones de velocidad. La fuerza de tensión en la banda tiene un protagonismo importante para poder transmitir el torque proporcionado por el servomotor de forma correcta al mecanismo.

Sistema Piñón y Cremallera
Este es uno de los mecanismos más utilizados en los sistemas servocontrolados. Nos permite obtener una excelente precisión, desplazar grandes cargas, lograr aceleraciones y velocidad altas, así como ser económicamente imbatible en carreras largas. El análisis de las fuerzas radiales producidas por las rampas de aceleración y el cálculo de precisión para el posicionamiento son algunos de los aspectos que no se pueden omitir en sistemas de este tipo.

Corona Dentada
Independientemente de la ubicación de los dientes (dentro o fuera de la corona), es importante considerar el factor de corrección y la dirección del dentado para el correcto dimensionamiento del conjunto piñón, reductor y servomotor.

Tornillo de Bolas, Planetario o Maquinado
En este mecanismo, son muchas las variables que se deben calcular para seleccionar tanto el servomotor como el tornillo. Las más importantes para el mecanismo suelen ser: velocidad crítica y tiempo de vida del tornillo; torque y velocidad máxima a la entrada; diámetro mínimo para evitar deflexión y paso.

Ejes Excéntricos (Levas, Cigüeñales)
Los ejes servocontrolados de este tipo suelen ser un reto importante para el dimensionamiento y la selección del servomotor. La combinación de una operación continua y alta velocidad son factores que determinan las características de los equipos propuestos. El radio excéntrico de la leva y la compensación u offset del mecanismo son variables determinantes para esta clase de aplicaciones.

Aplicación Rotativa Vertical con Masa Excéntrica
En estas aplicaciones se realizan análisis profundos y detallados sobre el uso de contrapesos para disminuir la excentricidad, el cálculo de distancias de frenado en condiciones de tiempo del paro de emergencia que garantiza la seguridad de los operarios y las capacidades de rodamientos para cargas en cantiléver.

Eje Telescópico
El análisis de esta aplicación depende del tipo de transformación mecánica que permite el comportamiento telescópico. Estas suelen ser un sistema piñón-cremallera, un tornillo de bolas o un sistema de poleas. La masa móvil del eje telescópico y el diámetro de las poleas tensoras son cruciales para la correcta selección del conjunto servorreductor.

Cálculo de Optimización o Ingeniería Inversa
El análisis de un servomotor instalado en una máquina existente se realiza mediante una simulación generada a partir de sus gráficas de posición, velocidad y corriente.
Este proceso nos permite conocer los niveles de utilización reales del eje servocontrolado, optimizar la selección de componentes, identificar problemas mecánicos o de sintonización, conocer el factor de seguridad con el que cuentan los equipos involucrados y tener la oportunidad de mejorar y optimizar el performance de los dispositivos mecánicos vinculados al servomotor. Este proceso es ideal para prototipos, máquinas fabricadas en línea, migraciones o actualizaciones de tecnología o componentes.
Nuestro servicio de ingeniería inversa nos permite realizar una optimización a partir de condiciones reales de operación y así proporcionar beneficios tangibles en el desempeño de los equipos, reducción de costos a partir de un análisis documentado e incrementar la confianza de las soluciones proporcionadas por nuestros clientes.
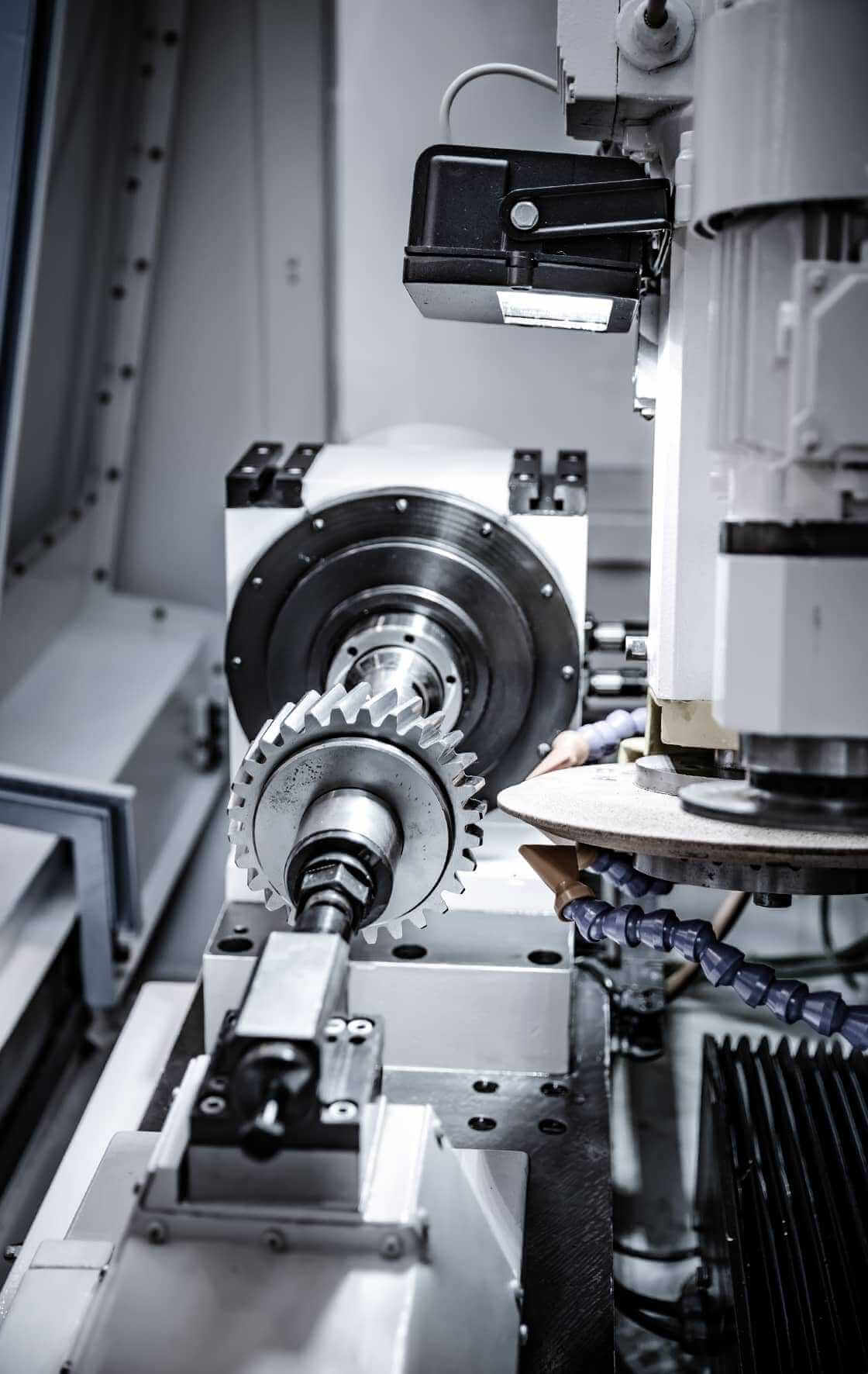
Elementos Mecánicos Adicionales
Todas las aplicaciones servocontroladas cuentan con elementos adicionales necesarios para el
correcto funcionamiento de un mecanismo. Algunos de estos componentes pueden ser:
- Trenes de engranes
- Poleas, bandas, cadenas o sprockets
- Coples de elastómero, fuelle o disk packs
- Guías o bujes de bolas
- Frenos de seguridad, limitadores de torque o clutches
Es necesario calcular las variables que determinen el correcto funcionamiento de dichos
componentes para garantizar el éxito del conjunto. Algunas de ellas son:
- Fuerzas de tensión
- Torque o fuerzas de fricción
- Momentos soportados por guías o bujes lineales
- Torques trasmitidos por tipo de sujeción
- Torque, tiempo y desplazamientos de frenado
- Torque de liberación en limitadores
- Respuesta por señales eléctrica