
El correcto dimensionamiento de un actuador lineal servocontrolado es un factor crítico en cualquier sistema de automatización industrial. Un error en la selección puede generar fallas prematuras, pérdida de precisión, sobrecostos energéticos e incluso paros de la línea de producción.
En este artículo analizamos los 8 errores más comunes al dimensionar un actuador lineal, cómo afecta el desempeño del sistema y qué criterios deben considerarse para garantizar confiabilidad, precisión y un tiempo de vida prolongado.
1.- Definir únicamente el perfil de movimiento y olvidarse del perfil de fuerza y carga.
Uno de los errores más frecuentes es intentar seleccionar el actuador únicamente considerando el perfil de movimiento.
Para calcular un actuador servocontrolado es indispensable definir:
- Perfil de movimiento (aceleración, velocidad constante y desaceleración)
- Perfil de fuerza aplicada durante el ciclo
- Punto exacto donde se aplica la fuerza
- Desplazamiento en el que ocurre esa fuerza
En los procesos industriales existen diferentes fases durante el movimiento de la carga, aceleración, velocidad constante y frenado. No es lo mismo aplicar fuerza durante velocidad constante que durante aceleración, donde el torque requerido aumenta significativamente.
En aplicaciones como servoprensas, no basta con conocer la fuerza máxima; es fundamental saber en qué punto del recorrido se aplica esa fuerza y durante que distancia. Sin esta información el cálculo del servomotor y del actuador será incorrecto.
2. Ignorar la orientación del actuador desde el inicio
La orientación modifica completamente el cálculo.
- Aplicaciones horizontales: El actuador se enfoca únicamente a empujar la carga.
- Aplicaciones verticales: En este caso interviene la aceleración de la gravedad.
Cualquier inclinación diferente a cero implica un componente por gravedad. No considerar este factor puede provocar un subdimensionamiento del sistema o requerir mayor torque del motor, reduciendo su tiempo de vida.
3.- Sobredimensionar el actuador
Seleccionar un actuador de mayor capacidad por seguridad es un error común. Algunas consecuencias de esta selección son:
- Incremento de la inercia del sistema.
- Peor comportamiento dinámico
- Posible inestabilidad del servomotor
- Mayor costo inicial
Un actuador sobredimensionado puede dificultar el control fino de velocidad y precisión. La selección correcta debe equilibrar capacidad, inercia y desempeño dinámico.
4.- No calcular el tiempo de vida del actuador
En los actuadores electromecánicos, existe un desgaste mecánico en los rodamientos y en los elementos de transmisión. Un error clásico es no considerar el ciclo de trabajo de la aplicación como: turnos por día, horas por año, distancia recorrida y frecuencia de operación.
En los actuadores electromecánicos convencionales, a mayor carga y distancia, menor es el tiempo de vida.
En contraste, tecnologías como las desarrolladas por Kytronics , el tiempo de vida no depende de la fuerza o carga aplicada, en contraste depende exclusivamente de la distancia total de desplazamiento.
En Urany , te ayudamos a realizar el correcto dimensionamiento del actuador considerando la tecnología adecuada para cada aplicación y/o presupuesto. Nuestras soluciones están probadas por un tiempo de vida de al menos 8 años.
5.- No considerar cargas radiales o desalineaciones
La mayoría de los actuadores lineales servocontrolados no están diseñados para absorbedores cargas radiales o excéntricas.
Las cargas laterales aparecen por:
- Desalineaciones
- Flexión de la estructura
- Cargas excéntricas
- Montajes incorrectos
Estas fuerzas generan:
- Desgaste prematuro de rodamientos
- Daño en tornillos y tuercas
- Pérdida de precisión y repetibilidad
Por esta razón, muchos actuadores ofrecen Guías integradas o Unidades de guiado externas.
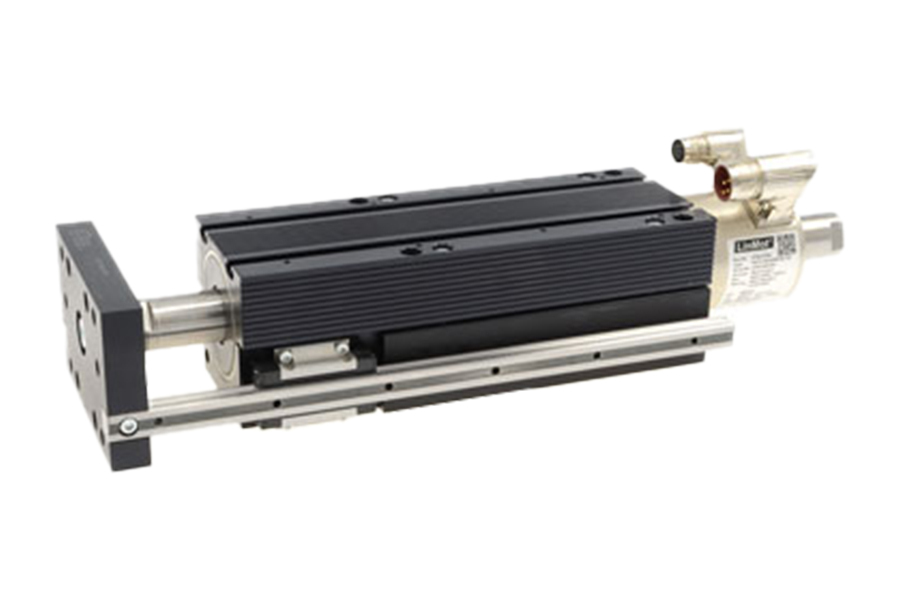
Soluciones como las de LinMot y UNIMOTION integran sistemas de guiado que protegen al actuador.
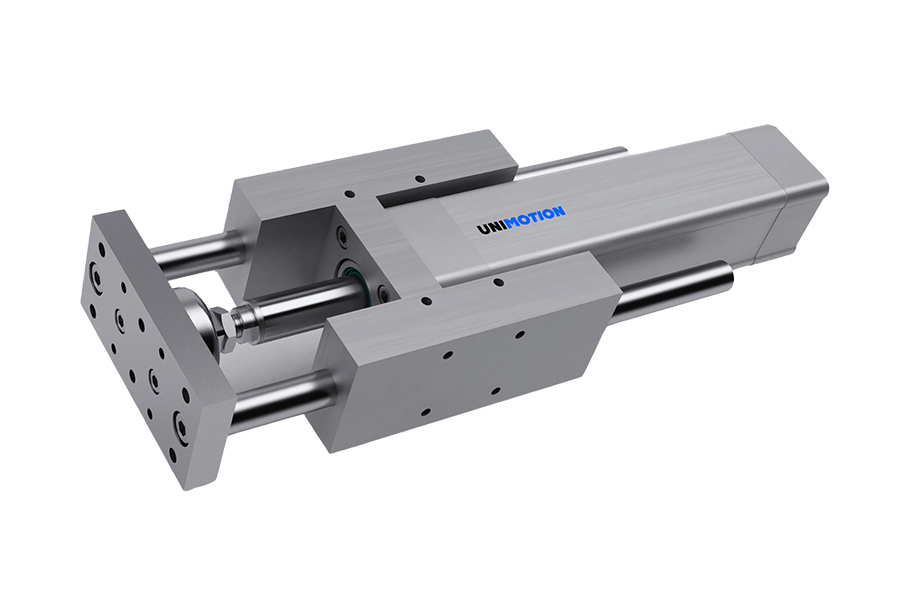
Actuador Unimotion con guías integradas
Actuador Unimotion con guías integradas
6.- Ignorar los impactos y cargas de choque (Shock Loads)
Los actuadores electromecánicos no están diseñados para absorber impactos directos sobre el vástago.
En aplicaciones robustas como corte o perforación, si no se integran sensores de límite de carrera, pueden generarse choques axiales que dañan tornillos, tuercas, rodamientos, engranes y el motor, provocando deformaciones internas, pérdidas de precisión, backlash progresivo o fallas súbitas.
En tecnologías específicas como Kytronics , la arquitectura permite mayor tolerancia a impactos comparada con sistemas mecánicos tradicionales.
La correcta integración de sensores y control evita daños y mantiene la precisión del sistema.
7.- No considerar escalabilidad futura
Muchos procesos evolucionan con nuevos productos. Si el actuador se selecciona justo al límite, cualquier cambio futuro requerirá reemplazo.
Es recomendable dejar un margen técnico razonable (20–50% dependiendo de la experiencia y aplicación), sin caer en sobredimensionamiento excesivo.
La ingeniería de selección debe contemplar escenarios futuros y capacidad de actualización de la línea o estación de trabajo.
8.- Tratar el actuador como elemento aislado
Un actuador lineal forma parte de un sistema servocontrolado completo:
- Servomotor
- Conducir
- Controlador
Si no se valida la compatibilidad entre servo y actuador, pueden presentarse problemas de control, incompatibilidad con el montaje, torque insuficiente o vibraciones.
Una ingeniería adecuada permite modificar parámetros como: paso del tornillo, relación de entrada y características mecánicas, para asegurar compatibilidad con el sistema de control seleccionado.
Conclusión
Dimensionar correctamente un actuador lineal no se limita a conocer el peso de la carga. Es necesario analizar:
- Perfil de movimiento
- Perfil de fuerza
- Orientación
- Vida útil
- Cargas radiales
- Impactos
- Escalabilidad
- Compatibilidad con el sistema servo
Una ingeniería integral garantiza precisión, confiabilidad y mayor retorno de inversión.
En Urany seleccionamos el actuador ideal y realizamos el cálculo adecuado para que tu aplicación funcione de manera correcta desde el primer momento.
Si estás buscando un actuador, contáctanos, será un placer para ayudarte.




